

旋轉(zhuǎn)機(jī)械設(shè)備振動(dòng)數(shù)據(jù)采集以及振動(dòng)信號(hào)分析
寬帶振動(dòng)測(cè)量是用于診斷一般機(jī)器狀況的***廣泛使用且成本有效的方法。
有兩種關(guān)于通過(guò)這種類型的測(cè)量進(jìn)行機(jī)器狀態(tài)監(jiān)測(cè)的ISO建議,大量使用的ISO 2372和更新的ISO 10816,它是舊標(biāo)準(zhǔn)的替代品。
ISO 10816的特點(diǎn)
測(cè)量在三個(gè)方向(水平,垂直,軸向)進(jìn)行。
通常基于返回RMS值的寬帶振動(dòng)測(cè)量來(lái)診斷機(jī)器狀況。ISO 10816保持較低頻率范圍在2到10 Hz之間靈活變化,具體取決于機(jī)器類型。上限頻率為1000 Hz。
ISO 10816以術(shù)語(yǔ)振動(dòng)幅度運(yùn)行,根據(jù)機(jī)器類型,振動(dòng)幅度可以是振動(dòng)速度,加速度或位移的RMS值。如果測(cè)量這些參數(shù)中的兩個(gè)或更多個(gè),則振動(dòng)嚴(yán)重性是返回相對(duì)******RMS值的參數(shù)。對(duì)于某些機(jī)器,ISO 10816還將峰峰值識(shí)別為條件標(biāo)準(zhǔn)。
該標(biāo)準(zhǔn)由幾個(gè)部分組成,每個(gè)部分處理某種類型的機(jī)器,其中極限值表區(qū)分可接受的振動(dòng)(綠色范圍),不滿意的振動(dòng)(黃色范圍),以及除非減少(紅色范圍)否則將導(dǎo)致?lián)p壞的振動(dòng)。
振動(dòng)分析(EVAM)
EVAM代表評(píng)估振動(dòng)分析方法,該方法生成三組機(jī)器狀態(tài)數(shù)據(jù):
條件參數(shù),是測(cè)量和計(jì)算值,描述機(jī)器振動(dòng)的各個(gè)方面。
在預(yù)設(shè)故障癥狀的幫助下,發(fā)現(xiàn),突出顯示和評(píng)估重要線條圖案的振動(dòng)光譜。
機(jī)器特定條件代碼(綠色,黃色,紅色)和條件值,基于條件參數(shù)和癥狀值的統(tǒng)計(jì)評(píng)估。
對(duì)于每個(gè)測(cè)量點(diǎn),用戶可以進(jìn)行單***選擇并定義***適合單個(gè)機(jī)器監(jiān)視的數(shù)據(jù)類型。替代方案包括:
包絡(luò)
時(shí)間同步平均
頻帶警報(bào)和測(cè)量結(jié)果的平均值,以提***警報(bào)可靠性
時(shí)間信號(hào)分析,用于直接從原始信號(hào)中詳細(xì)評(píng)估alla種類的癥狀
由諧振或其他干擾源引起的隨機(jī)***讀數(shù)被濾除,從而***大限度地減少了誤報(bào)的數(shù)量。
時(shí)間信號(hào)分析
時(shí)間信號(hào)是所有評(píng)估和計(jì)算機(jī)器頻率的來(lái)源。時(shí)間信號(hào)是來(lái)自傳感器的電信號(hào),反映了機(jī)器中發(fā)生的所有事件。它顯示了事件之間的時(shí)間以及事件產(chǎn)生的能量。可以區(qū)分在FFT譜中以相同模式發(fā)生的各種故障。
條件參數(shù)
測(cè)量所選頻率范圍的條件參數(shù)。它們可以單***激活,并顯示在測(cè)量結(jié)果表和圖表中。可用的條件參數(shù)是:
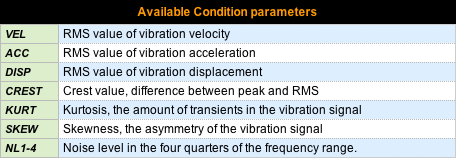
峰值和峰峰值顯示在為時(shí)間信號(hào)選擇的單位中。
帶有“癥狀”的頻譜分析
為了便于在光譜中識(shí)別模式,EVAM提供了一系列現(xiàn)成的“故障癥狀”。這些是突出顯示譜線圖案并將線的RMS值之和顯示為癥狀參數(shù)(可以評(píng)估和趨勢(shì)化)的說(shuō)明。大多數(shù)癥狀是通過(guò)使用rpm作為變量自動(dòng)配置的,因?yàn)橛行┬枰斎耄甾D(zhuǎn)子上的葉片數(shù)量。當(dāng)設(shè)置測(cè)量點(diǎn)時(shí),從Condmaster中的菜單中選擇合適的癥狀和癥狀組。
機(jī)器特定條件代碼
在Condmaster中,可以對(duì)所有活動(dòng)參數(shù)設(shè)置警報(bào)限制。收集測(cè)量結(jié)果后,可以創(chuàng)建EVAM“標(biāo)準(zhǔn)”,將新參數(shù)值與統(tǒng)計(jì)平均值進(jìn)行比較,并顯示無(wú)綠色 - 黃色 - 紅色標(biāo)度的無(wú)量綱條件值。
相位測(cè)量
相位是以旋轉(zhuǎn)度表示的時(shí)間延遲。我們計(jì)算轉(zhuǎn)速計(jì)脈沖的通過(guò)與來(lái)自振動(dòng)傳感器的感興趣的頻率分量的峰值之間的時(shí)間延遲。所呈現(xiàn)的值是相對(duì)角度,而不是絕對(duì)角度,因?yàn)閾Q能器或電子電路中的相位滯后沒有補(bǔ)償。
![[field:title /]](/uploads/allimg/160926/1-160926095J5.jpg)
![[field:title /]](/uploads/allimg/170316/1-1F316164532.jpg)
![[field:title /]](/uploads/allimg/160927/1-16092G12F7.jpg)
![[field:title /]](/uploads/allimg/160926/1-160926164057.jpg)
![[field:title /]](/uploads/allimg/160929/1-160929164110.jpg)


 京公網(wǎng)安備 11010702001993號(hào)
京公網(wǎng)安備 11010702001993號(hào)